|
「電子部品」を追加して、「回路」や「基本特性」を学ぶ!
|
馬場 政勝 著
2017年 8月23日発売
A5判
144ページ
定価 ¥2,090(本体 ¥1,900)
|
|
ISBN978-4-7775-2022-0 C3055 ¥1900E
|
 |
「ロボット」や「乗り物」などの工作をする際にお勧めなのが、「キット」の利用です。
「キット」には、ギアやモータなどの駆動に必要な部品はもちろん、本体の見栄えを良くする部品も揃っているため、見た目にも楽しみながら工作ができます。
本書では、この「キット」を改造し、「電子部品」や「回路」を加えて、必要最小限の手間で本格的な電子工作を作る方法を解説しています。
|
|
| ■ 主な内容 ■ |
第1章 犬型ロボット
[1-1] 「犬型ロボット」の仕組み
[1-2] パソコンの通信ソフト
[1-3] 「シリアル通信」の回路
[1-4] 「PICマイコン」の回路
[1-5] 「モータ」を動かす回路
[1-6] 「発光ダイオード」を発光させる回路
[1-7] 「PICマイコン」用の電源
[1-8] 「モータ・ドライバ」用の電源
[1-9] 組み立て
[1-10] 動かし方
第2章 音に反応する「キリン・ロボット」
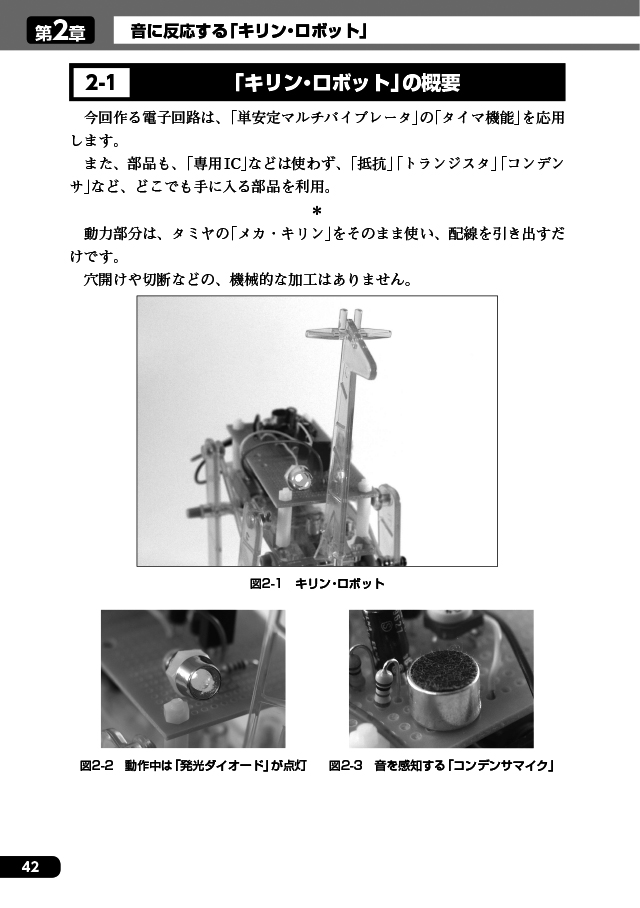
[2-1] 「キリン・ロボット」の概要
[2-2] 動く原理
[2-3] エレクトレット・コンデンサマイク(ECM)
[2-4] 単安定マルチバイブレータ回路
[2-5] 「キリン・ロボット」の回路
[2-6] 音の感知
[2-7] 作り方
[2-8] 動かし方
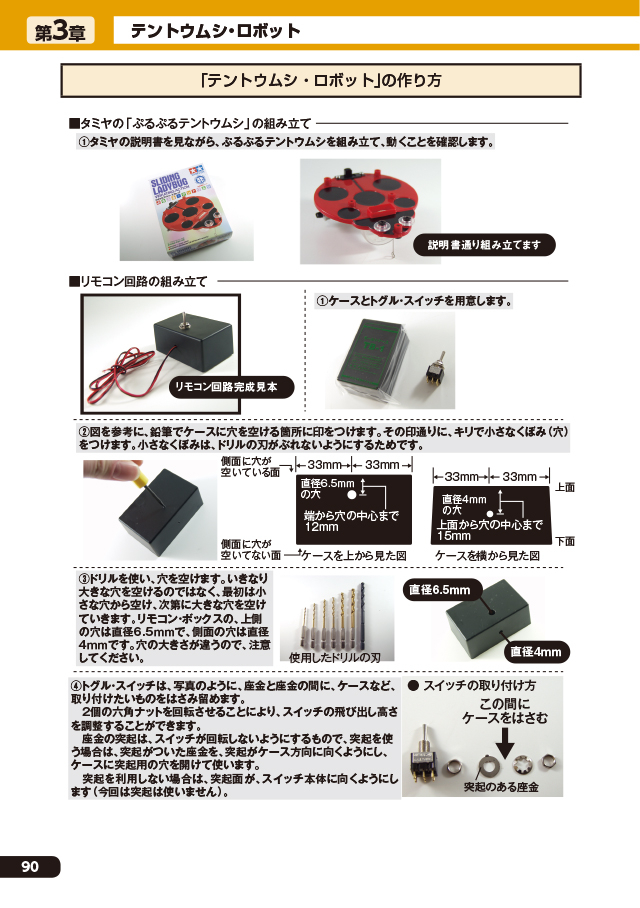
第3章 テントウムシ・ロボット
[3-1] 「テントウムシ・ロボット」の概要
[3-2] 「振動」について
[3-3] 「テントウムシ・ロボット」の動く仕組み
[3-4] 「テントウムシ・ロボット」の回路
[3-5] 作り方
第4章 光るロープウェイ
[4-1] 「ロープウェイ」の仕組み
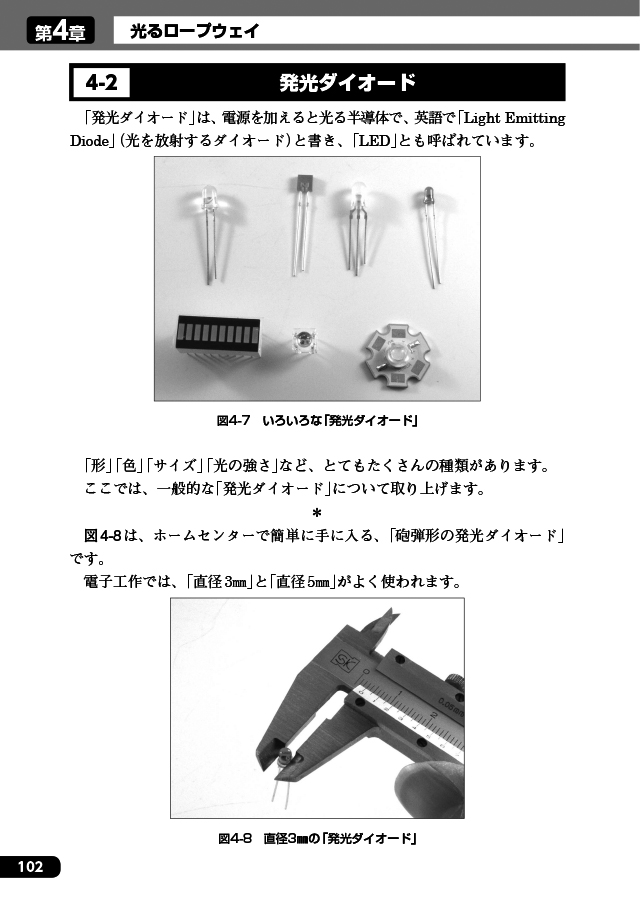
[4-2] 発光ダイオード
[4-3] 「光るロープウェイ」の回路設計
[4-4] 「並列つなぎ」をした場合の回路
[4-5] 「複数の色」をつなぐ場合の回路
[4-6] 組み立て
第5章 「電源回路」の設計
[5-1] 「電源回路」の概要
[5-2] 「電源回路」の仕組み
[5-3] 電子回路の構成
[5-4] 「可変レギュレータ」の扱い方
[5-5] 回路図
[5-6] ケース加工
|
本書内容に関するご質問は、こちら
本書のサポートページはこちら.
|
|
|