第1章 「Kinect」と「マインドストームNXT」を動かす準備
[1-1] 用意するもの
[1-2] ソフトウェアのインストール
第2章 「スケルトン情報」で「ロボット・アーム」を動かす
[2-1] 「Kinect」から取得できる「人体情報」
[2-2] 「Kinect」で「ロボット」を動かす仕組み
[2-3] 「ロボット・アーム」の組み立て
[2-4] 「Kinect」の情報と「ロボット」の動き
[2-5] 動かしてみよう
[2-6] サンプル・プログラム
[2-7] 「サンプル・プログラム」の解説
第3章 二人で「ロボット」を走らせる
[3-1] 二人で「ロボット」を動かす仕組み」
[3-2] 「Kinect」の情報と「ロボット」の動き
[3-3] 「なげロボ」の組み立て
[3-4] 動かしてみよう
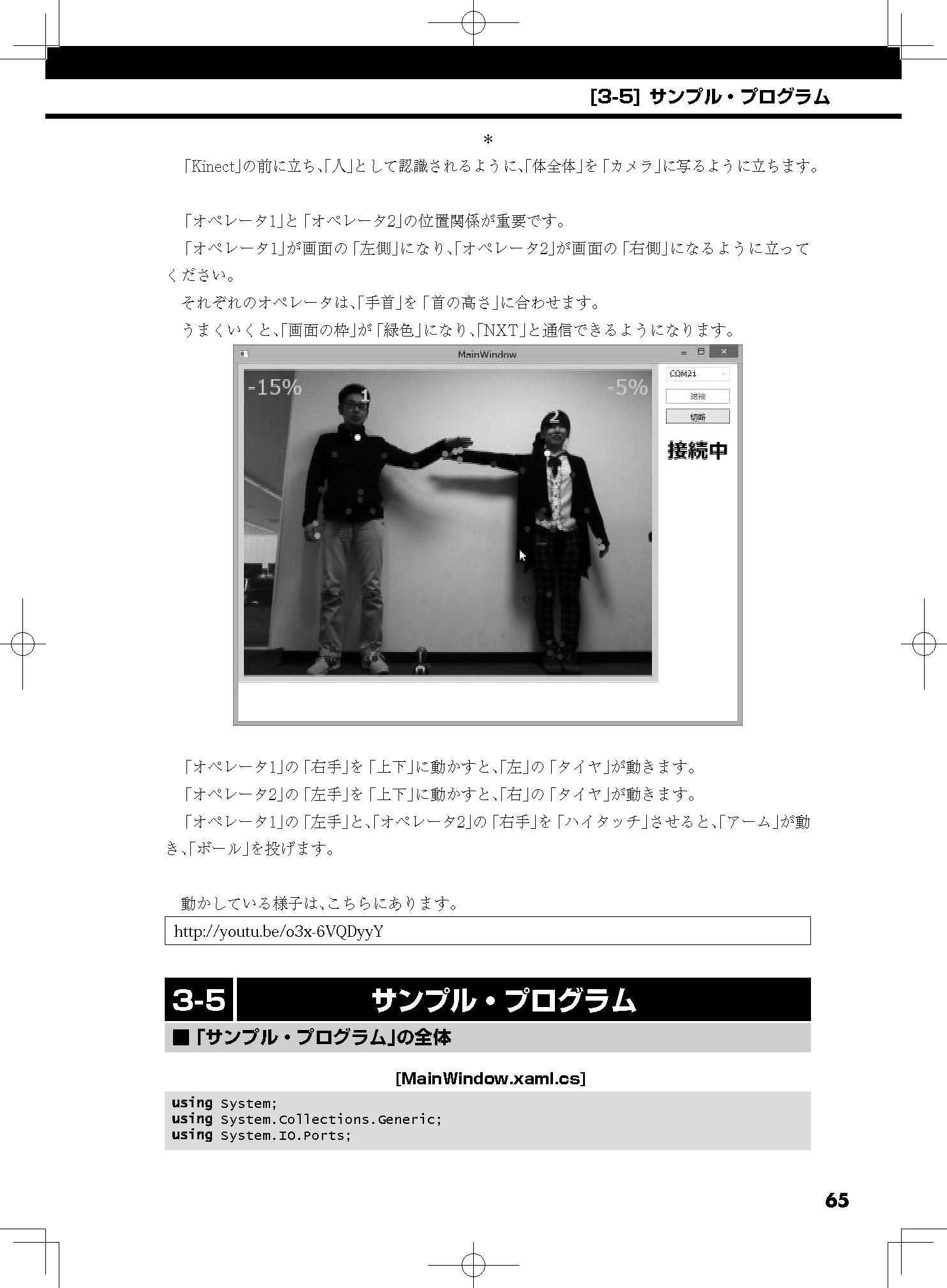
[3-5] サンプル・プログラム
[3-6] 「サンプル・プログラム」の解説
第4章 「深度情報」を使って、「地球」を回す
[4-1] 「地球」を回す仕組み
[4-2] 「Kinect」の情報と「ロボット」の動き
[4-3] 「ターン・テーブル」の組み立て
[4-4] 動かしてみよう
[4-5] サンプル・プログラム
[4-6] 「サンプル・プログラム」の解説
第5章 「音声」と「フェイス・トラッキング」機能を使って、動かす
[5-1] 準 備
[5-2] 「Kinect」の情報と「ロボット」の動き
[5-3] 「自動ドア」の組み立て
[5-4] 動かしてみよう
[5-5] サンプル・プログラム
[5-6] 「サンプル・プログラム」の解説
第6章 Kinect for Windows SDK1.7
[6-1] 「Kinect for Windows SDK1.7」の新しい機能
[6-2] 「Kinect」の情報と「ロボット」の動き
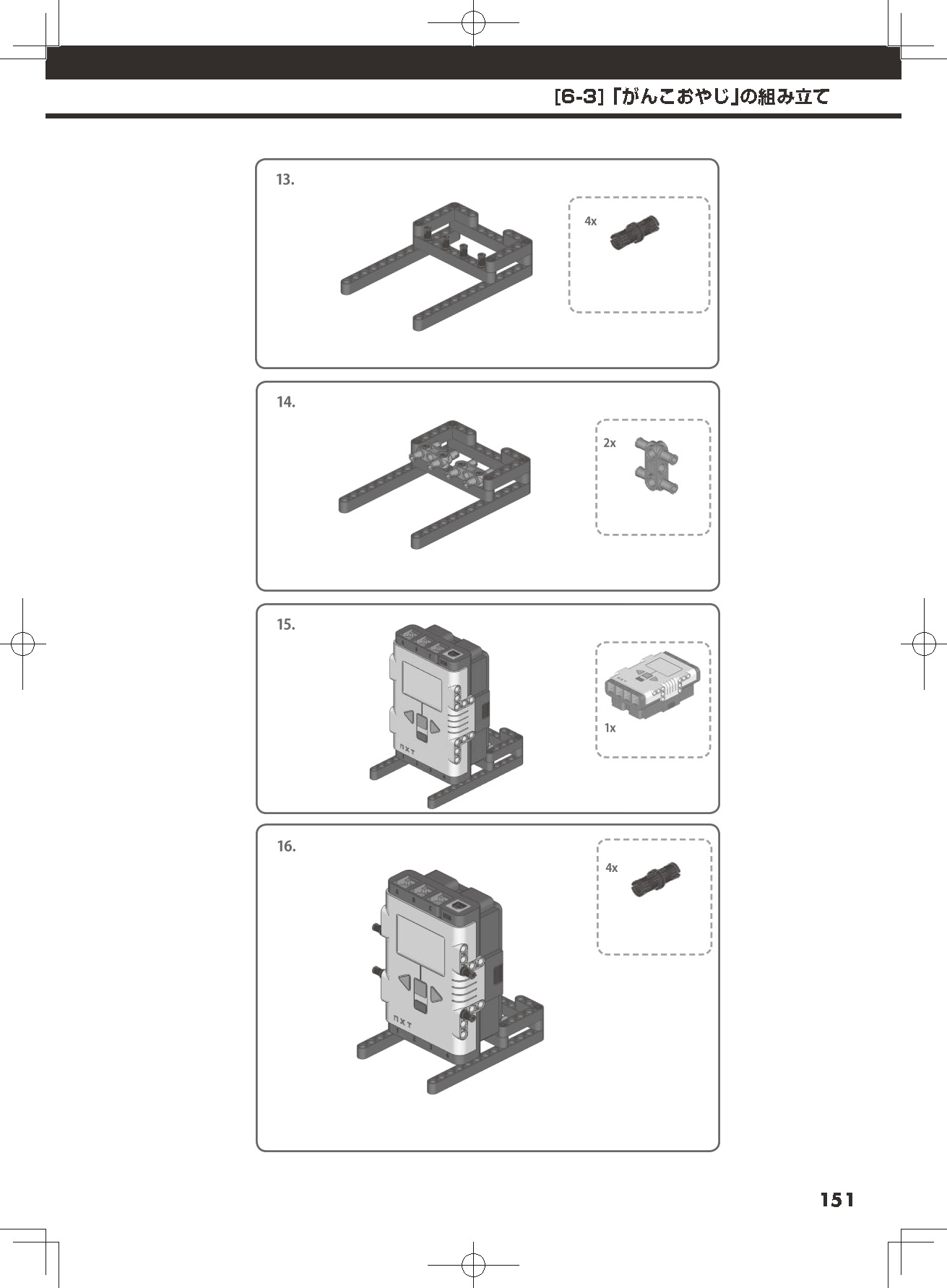
[6-3] 「がんこおやじ」の組み立て
[6-4] 動かしてみよう
[6-5] サンプル・プログラム
[6-6] 「サンプル・プログラム」の解説
第7章 トラブル・シューティング
[7-1] ハードウェア
[7-2] ソフトウェア
附録 マインドストーム EV3
|